

moteur synchrone à excitation / rotor bobiné : fonctionnement
 0
0
Le moteur synchrone à rotor bobiné / induction reprend exactement la même philosophie du moteur synchrone à aimant permanent. La différence ici se situe principalement dans le fait qu'il faut alimenter le rotor puisque ce dernier n'est pas "nativement" polarisé (comme c'est le cas avec un aimant qui a deux polarités nord / sud en permanence).
A lire aussi : le principe fondamental d'un moteur électrique (champ électrique, magnétique etc.).
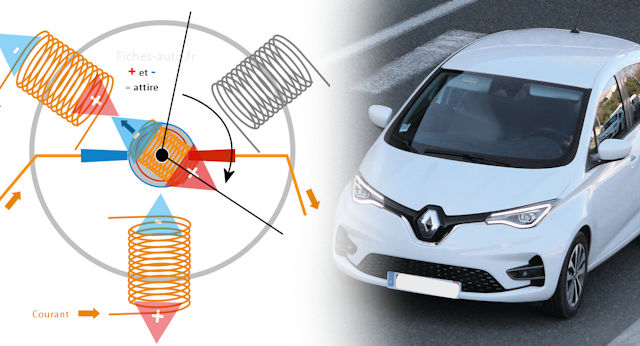
Cette alimentation du rotor se fait par le biais de balais / charbons qui permettent d'établir un contact avec le rotor qui est en mouvement. Il y a toutefois une autre manière de faire plus atypique qui arrive à transmettre le courant via un dispositif par induction (à ne pas confondre avec les moteurs à induction asynchrones / cage d'écureuil), il s'agit du moteur synchrone à excitation. Cela date des années 2010 et a été mis en oeuvre dans les années 2020 par Valéo et ZF par exemple.
Les charbons viennent alimenter le rotor grâce à ce contact rond / circulaire qui frottent sur ce dernier (en bas à droite sur l'image)
On le dit synchrone car la vitesse du rotor est synchronisée avec la fréquence du courant électrique injecté dans le stator ou le rotor (ça dépend comment le moteur est fichu, car il y a plusieurs types de montages de moteur synchrone à induction malgré que le principe reste le même).

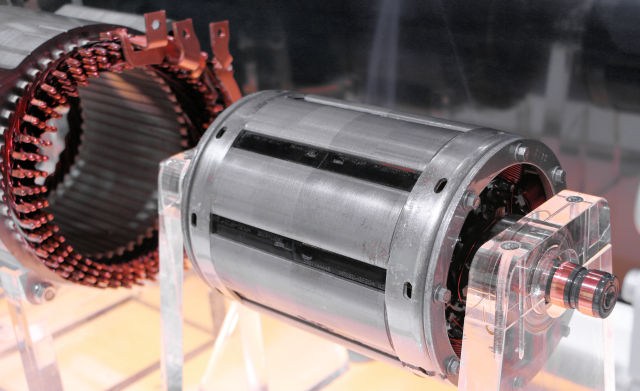
Sur ce moteur de toute petite taille (pas pour l'automobile), on voit les charbons indiqués par les flèches qui viennent frotter sur le contact, laissant d'ailleurs des traces (c'est donc un moteur soumis à l'usure ...)
Courant continu ? Alternatif ? triphasé ? Les différents types
Plusieurs types de moteurs à rotor bobiné existent.
Moteur synchrone à courant continu / moteur à courant continu ou alternatif (dit universel)
Il y a par exemple les moteurs à courant continu qui ont un stator à aimant permanent. Le rotor voit sa polarité changer à chaque demi-tour en raison de la manière dont les balais sont en contact avec lui : deux demi-sphères isolées qui alimentent le rotor soit dans un sens soit dans l'autre. En effet, à chaque demi-rotation les balais viennent en contact avec l'un ou l'autre des pôles du rotor, ce qui permet d'inverser la polarité du rotor qui peut alors continuer de tourner.
Le moteur universel est du même type sauf qu'il peut accepter du courant continu ET alternatif (qu'on l'alimente par l'un ou par l'autre lui importe peu). Pour cela, on remplace les aimants permanents du rotor par des bobines. Ces bobines sont liées au même circuit de l'alimentation du rotor, et donc quand on alimente le moteur en courant alternatif les pôles du stator s'inversent. Du côté du rotor, l'inversion du courant induit que les pôles restent stables et ne changent pas de sens, c'est donc l'inversion constante des polarités du rotor qui donnent les pulsations et font tourner le moteur.
A l'inverse, si j'alimente en courant continu, les pôles du stator restent fixes et ce sont les polarités du rotor qui vont fluctuer et permettre les impulsions par force électromagnétique.
Moteur éteint seul l'aimant permanent du stator induit un champ magnétique polarisé
Quand j'alimente le rotor bobiné en électricité il se transforme en aimant, ce que l'on appelle un électro-aimant. Les polarité des rotor et stator interfèrent et il y a donc un mouvement
Suite du mouvement
Une fois atteint une demi rotation, le contact au niveau des balais changent grâce aux deux demi-anneaux isolés l'un de l'autre. Le courant change alors de sens dans la bobine et les pôles s'inversent, on repart pour un demi-tour et ainsi de suite
Moteur synchrone à rotor bobiné triphasé
Ici on reprend le même principe que le moteur synchrone à aimant permanent, la seule différence est qu'on remplace l'aimant permanent par un bobinage alimenté (un électro-aimant donc).
On parle de triphasé car au niveau du stator on a trois phases, à savoir trois bobines qui vont avoir le rôle d'aimants pilotés. Ces phases vont donc donner des impulsions magnétiques vers le rotor pour le faire bouger. Le courant alternatif induit que les polarités des phases changent, et donc cela permet d'induire une succession de changement de pôles permettant de faire bouger le rotor.
Quand rien n'est alimenté il n'y a aucune force magnétique présente au repos contrairement à un moteur à aimant permanent.gif)
J'alimente le rotor : j'ai donc désormais un aimant prêt à réagir au centre de mon moteur.gif)
Je fais tourner mon rotor grâce à des impulsions électriques dans les phases (bobines du stator), car l'injection de courant induit un champ magnétique..gif)
Voici le mouvement induit.gif)
J'active désormais une autre phase et j'inverse le courant de la phase en haut à gauche pour continuer de faire tourner le rotor. Le but est de faire tourner le rotor en lui faisant subir des impulsions de champ magnétique.gif)
Ainsi de suite ...
avantages / inconvénients
Côté avantages on note que le rotor est peu coûteux et polluant à produire : pas de terres rares qui composent les aimants permanents. Le rendement est aussi assez intéressant avec quelque chose qui est assez semblable aux moteurs à aimant permanent, soit près de 90% sachant qu'ici il faut alimenter le rotor (c'est donc un peu moins efficient).

Sur ce rotor bobiné de Zoe on voit bien les deux contacts destinés aux balais (qui vont alimenter le rotor pour le transformer en aimant)
Le rendement reste un peu moins bon qu'avec les moteur à aimant permanent car le rotor doit être alimenté. De plus, l'alimentation du rotor induit de la chaleur, on a donc plus de risque de surchauffe qui peut à terme fatiguer le moteur ou encore les roulements alentours. En conduite sportive cela peut devenir ennuyeux si il n'y pas de dispositif de refroidissement.
Enfin, il faut impérativement des balais pour alimenter le rotor. Ces derniers finissent par s'user et il n'y a plus de contact possible.
Sur la Zoe, Renault préconise leur changement tous les 70 000 km.
Sur quels modèles ?
On en trouve sur les antiques 106 électriques des années 90 qui fonctionnaient au plomb (batterie). On en trouve désormais sur la Zoe mais la grande majorité privilégie l'aimant permanent pour le rotor et non une bobine alimentée.
Ces articles pourraient vous intéresser :
Ecrire un commentaire

Avis Electrique
(Tri par ordre de longueur de l'avis)

Avis Electrique
(Tri par ordre chronologique)
Fiches techniques voitures électriques





































Sondage au hasard :
Croyez-vous vraiment à un avenir tout électrique ?
Sujets pris au hasard